传感器变少要背锅?Uber事故原因又有新可能
转眼间时间已经来到了4月,就在半个多月前,Uber公司CEO Dara Khosrowshahi还在宾夕法尼亚州匹兹堡的办公室内与丰田副社长友山茂树和丰田研究院总裁Gill Pratt谈笑风生,Dara Khosrowshahi的心中甚至还有着一丝得意,因为作为全球顶级汽车制造厂商的丰田汽车竟然要向Uber学习自动驾驶技术。
可惜Dara Khosrowshahi只得意了短短三天的时间,他心中的喜悦就因3月18日晚的一起致命车祸变得支离破碎。这场车祸不仅仅打击了Dara Khosrowshahi,也给整个自动驾驶行业蒙上了一层不小的阴影。根据最新的一份调查报告显示,很有可能是因为传感器数量的减少直接导致了这起事故的发生,下面我们就来对这份报告做一个简要的分析。


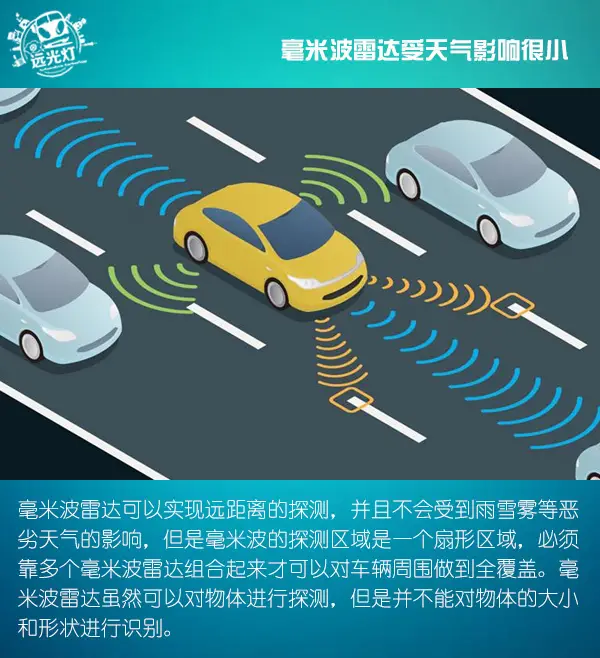
感知作为实现自动驾驶的一个重要环节,一直都是工程师们的重点突破的环节,目前多种传感器融合的解决方案基本成为了行业内的共识,而单纯想只靠摄像头或者毫米波雷达就实现完全自动驾驶可以说是一种不负责任的“耍流氓”行为。
至于为什么要让多种传感器进行协作是因为目前自动驾驶车辆上所用到的不同传感器都或多或少的存在着一些不足。

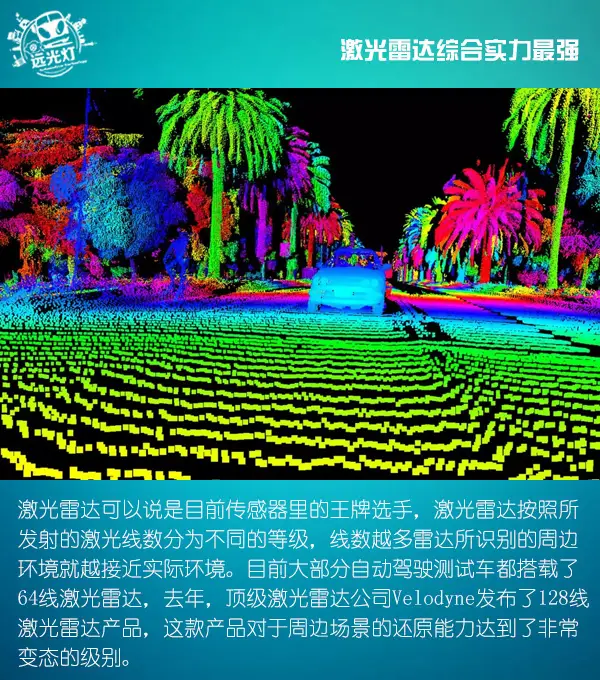
激光雷达的探测距离可以比毫米波雷达更远,同时激光雷达还可以具备像摄像头一样的识别能力。但是激光雷达也会受到雨雪雾等恶劣天气的影响,同时大部分自动驾驶车型为了能够覆盖车辆360°的视角都会将激光雷达安装在车辆顶部,这样所带来的缺点就是激光雷达由于角度问题无法扫描到距离车辆很近的区域。据Velodyne的相关人员介绍,如果将激光雷达安装在车辆顶部会在车身周围形成3米的盲区。
一般来讲,为了保证安全性,在同一个检测区域都要设置两个以上的传感器互相覆盖,不同传感器的探测结果要进行相互验证。因此在一辆设备完善的自动驾驶测试车上几乎不会存在探测的盲区。

尽管存在着因为激光雷达数量减少而无法对行人进行充分检测的可能性,但是3月18日事故中的行人伊莱恩▪赫茨伯格和她的自行车并不能说是突然出现在车前的,而且事故当时的天气情况良好,旁边也没有会对行人造成遮挡的其他障碍物,自动驾驶车辆完全应该在事故发生之前就检测到行人和她的自行车。
基于这种情况,Waymo CEO约翰▪克拉富西克和Mobileye CEO阿姆农▪沙舒亚发表了相同的观点,他们都认为自家的技术可以完美检测到类似情况下的路人和自行车。
当硬件出现问题的可能性变得很低的时候,导致事故的原因就更有可能来自于软件层面,目前已经有一些专业人士在怀疑Uber自动驾驶测试车的软件系统在事故发生时出现了故障。不过针对于事故发生的真正原因,我们还是要等到最终调查结果公布后才能定论。